06. SLAM Challenges
SLAM Challenges
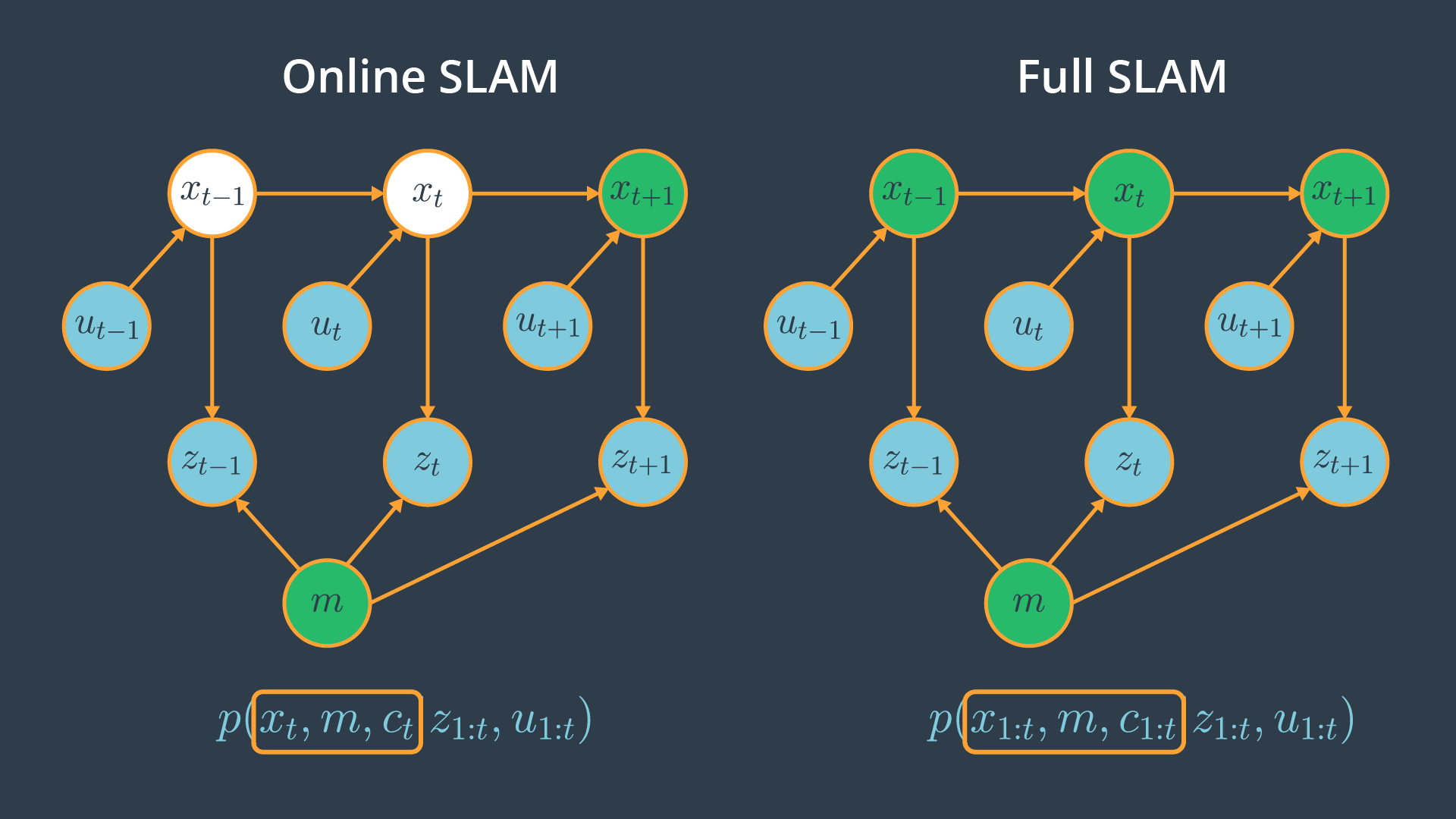
Computing the full posterior composed of the robot pose, the map and the correspondence under SLAM poses a big challenge in robotics mainly due to the continuous and discrete portion.
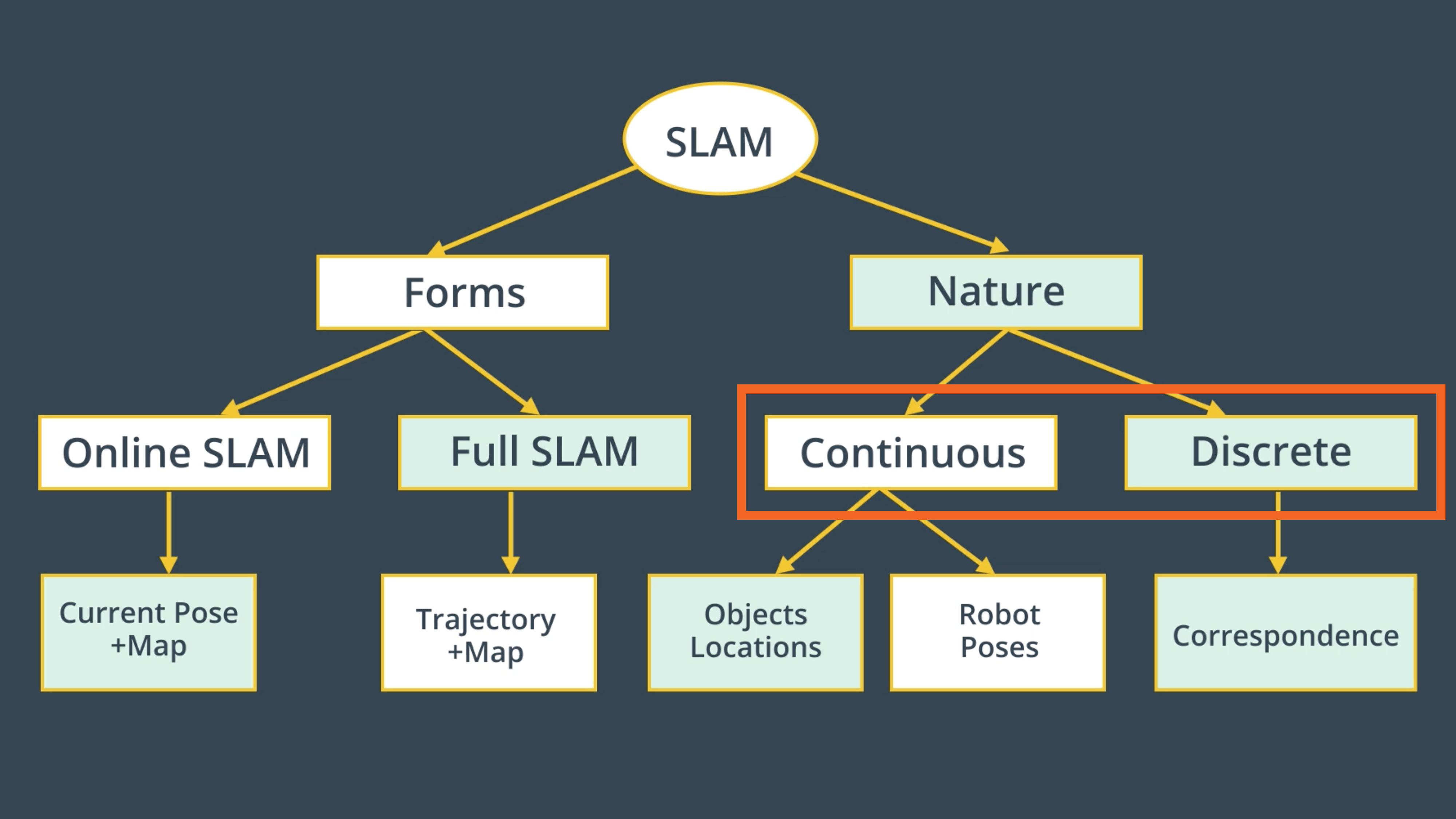
Continuous
The continuous parameter space composed of the robot poses and the location of the objects is highly dimensional. While mapping the environment and localizing itself, the robot will encounter many objects and have to keep track of each one of them. Thus, the number of variables will increase with time, and this makes the problem highly dimensional and challenging to compute the posterior.
Discrete
Next, the discrete parameter space is composed out of the correspondence values, and is also highly dimensional due to the large number of correspondence variables. Not only that, the correspondence values increase exponentially over time since the robot will keep sensing the environment and relating the newly detected objects to the previously detected ones. Even if you assume known correspondence values, the posterior over maps is still highly dimensional as we saw in the mapping lessons.
You can now see why it’s infeasible to compute the posterior under unknown correspondence. Thus, SLAM algorithms will have to rely on approximation while estimating a posterior in order to conserve computational memory.
SOLUTION:
- Few objects
- Small space